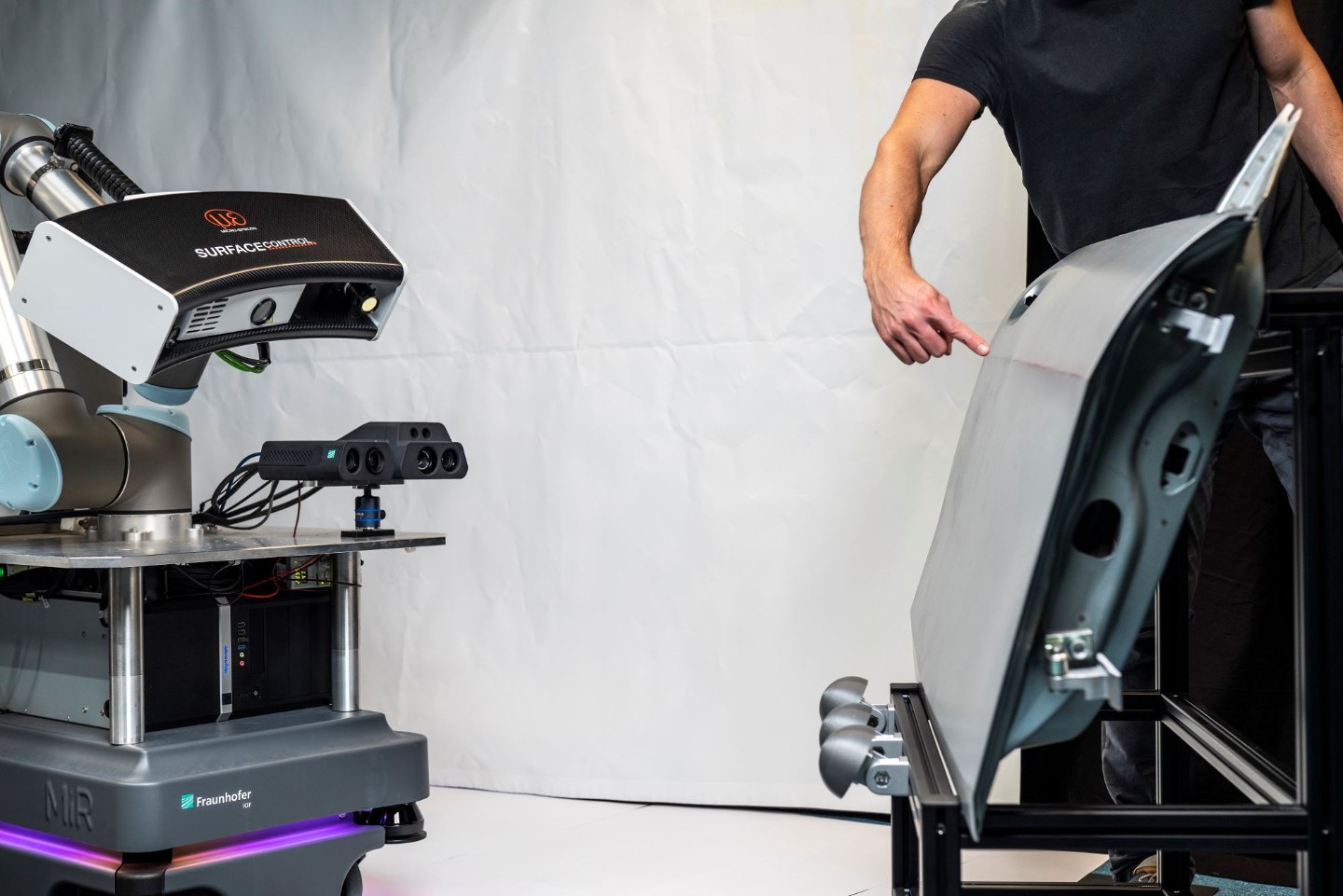
Anwendung von leistungsfähigen Handling- und Schreitrobotersystemen in Kombination mit unseren optisch und photonisch bildgebenden Sensoren und Systemen für industrielle und lebensnahe Applikationsfelder.
Unsere Sensoren und Systeme können aufgrund ihrer Miniaturisierbarkeit und ihres modularen Aufbaus in Kombination mit verschiedenen Handling- und Schreitroboter-Plattformen angewendet werden. Dabei ermöglichen die digitalen Augen, realisiert durch unsere Sensorik, Messtechnik und Software, Roboteranwendungen sowohl im Innen- als auch im Outdoorbereich.
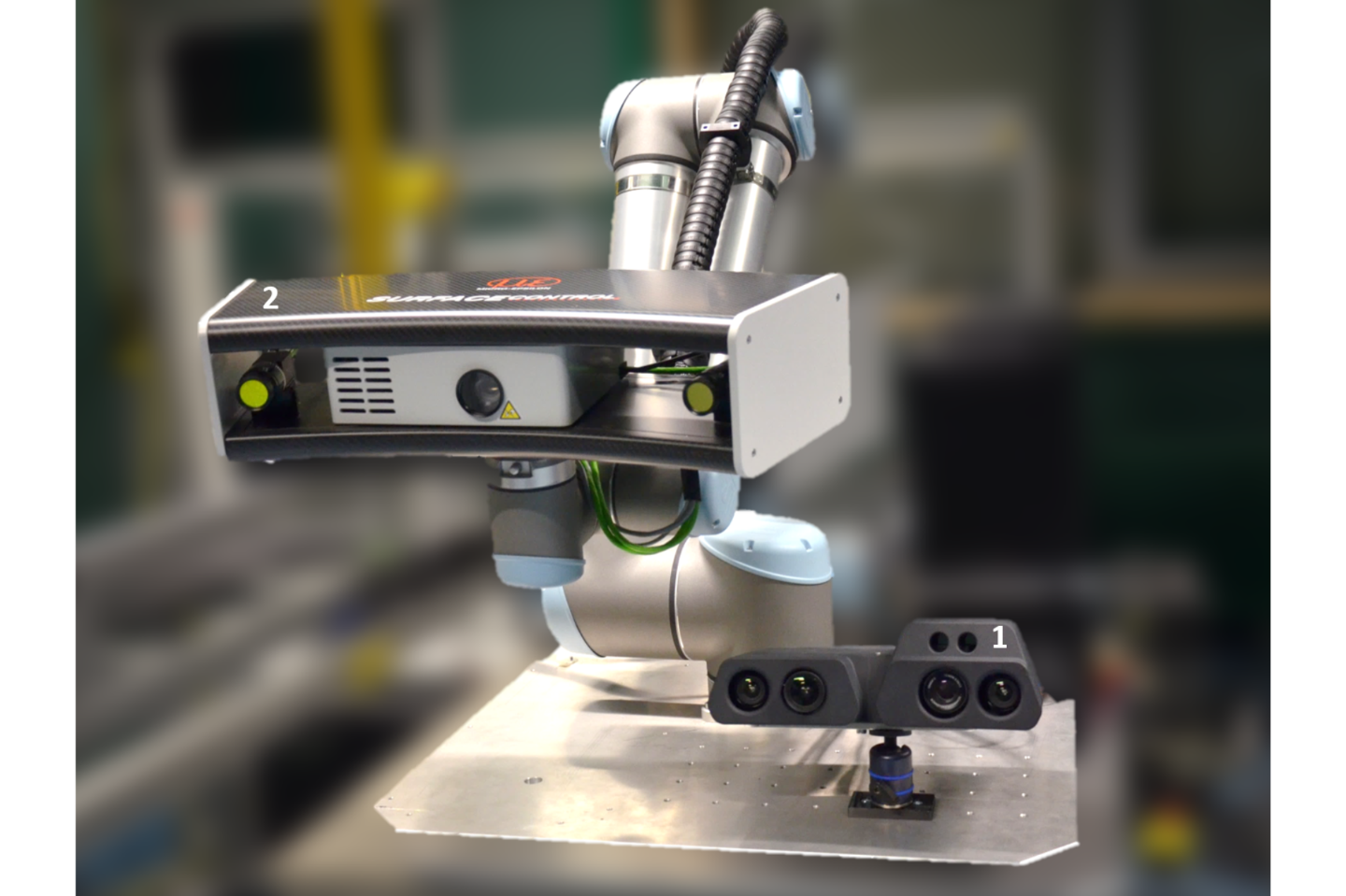
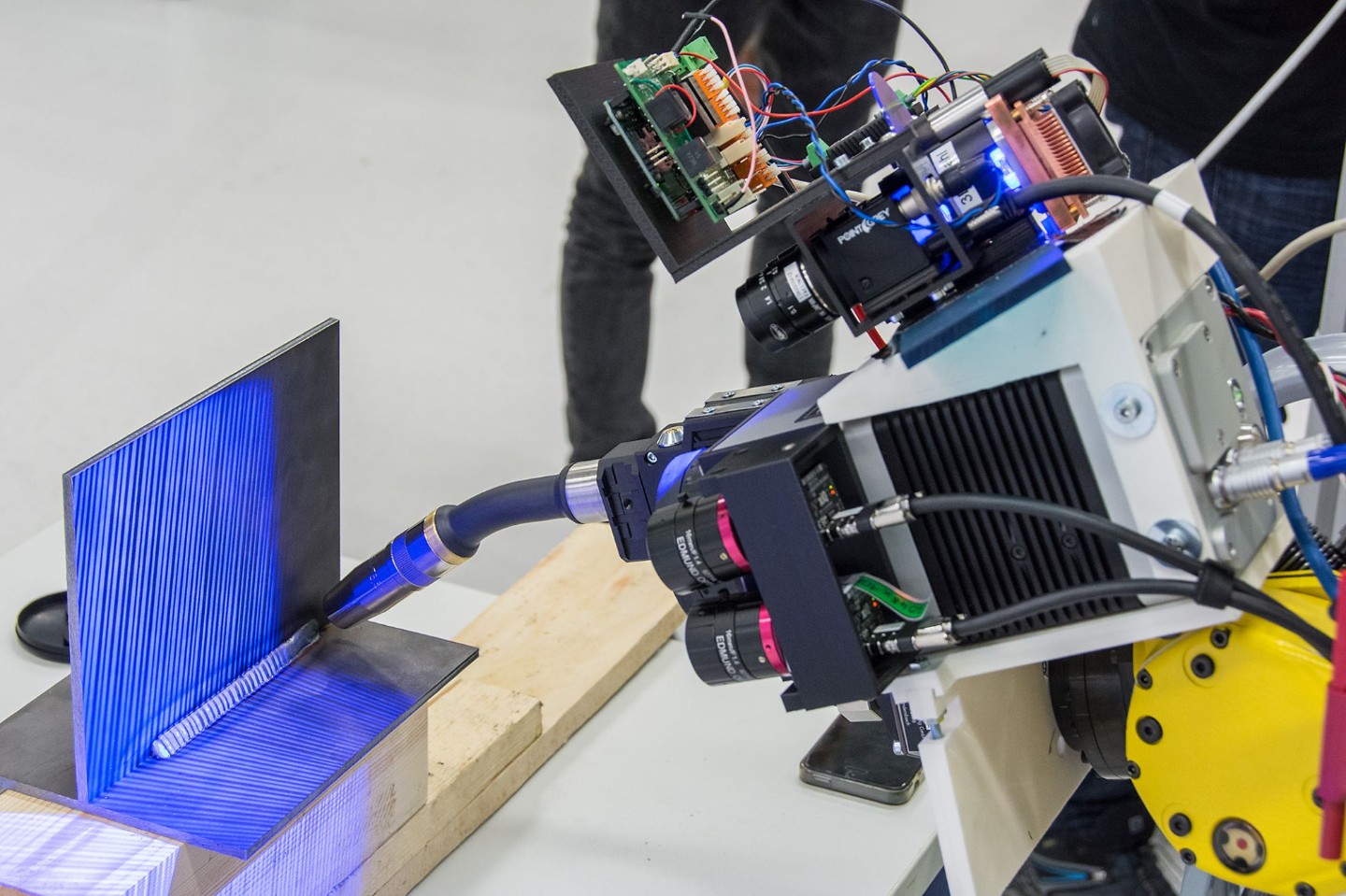
In verschiedenen Ausführungen ergänzen wir industrietaugliche Roboterplattformen mit unseren High-Speed 3D-Messsystemen als auch unseren Photogrammetrie-Lösungen und anderen bildgebenden Sensormodalitäten, damit sowohl Handling- als auch Schreitroboter in die Lage versetzt werden, komplexe Aufgaben in Industrie, Biomedizin und weiteren lebensnahen Anwendungsbereichen zu realisieren.
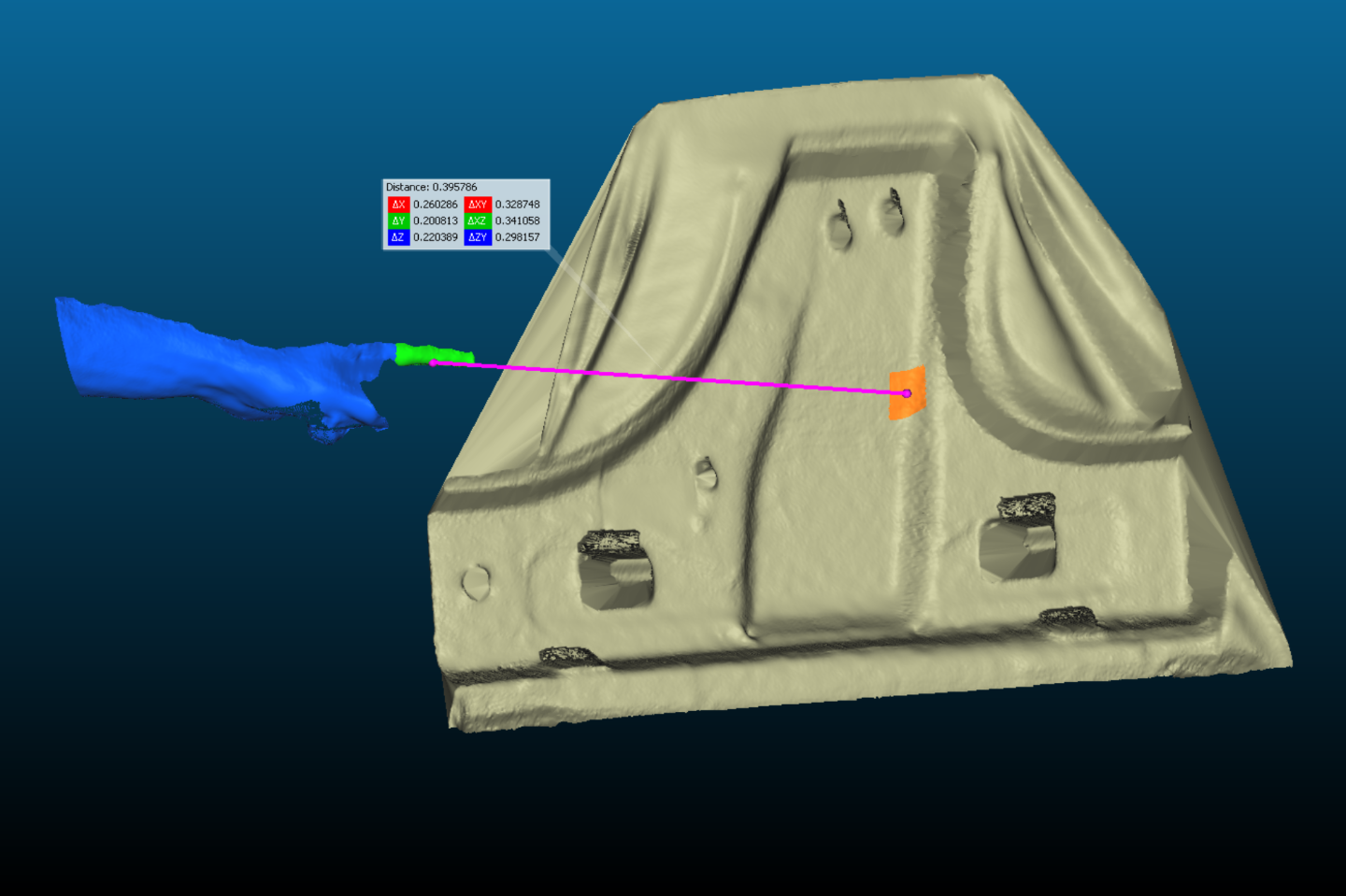
Durch die Integration unserer Sensoren und Messsysteme können Handling- und Schreitroboter nicht nur Objekt- und Umweltdaten in Echtzeit erfassen und Positionen sowie Entfernungen präzise messen, sondern auch in komplexen Arbeitsumgebungen intelligent navigieren.
Für fahrerlose Transportsysteme erweitert unsere 3D-Sensorik die Navigationsfähigkeit, Objekt- und Szenenerkennung sowie Robustheit gegenüber Störeinflüssen.
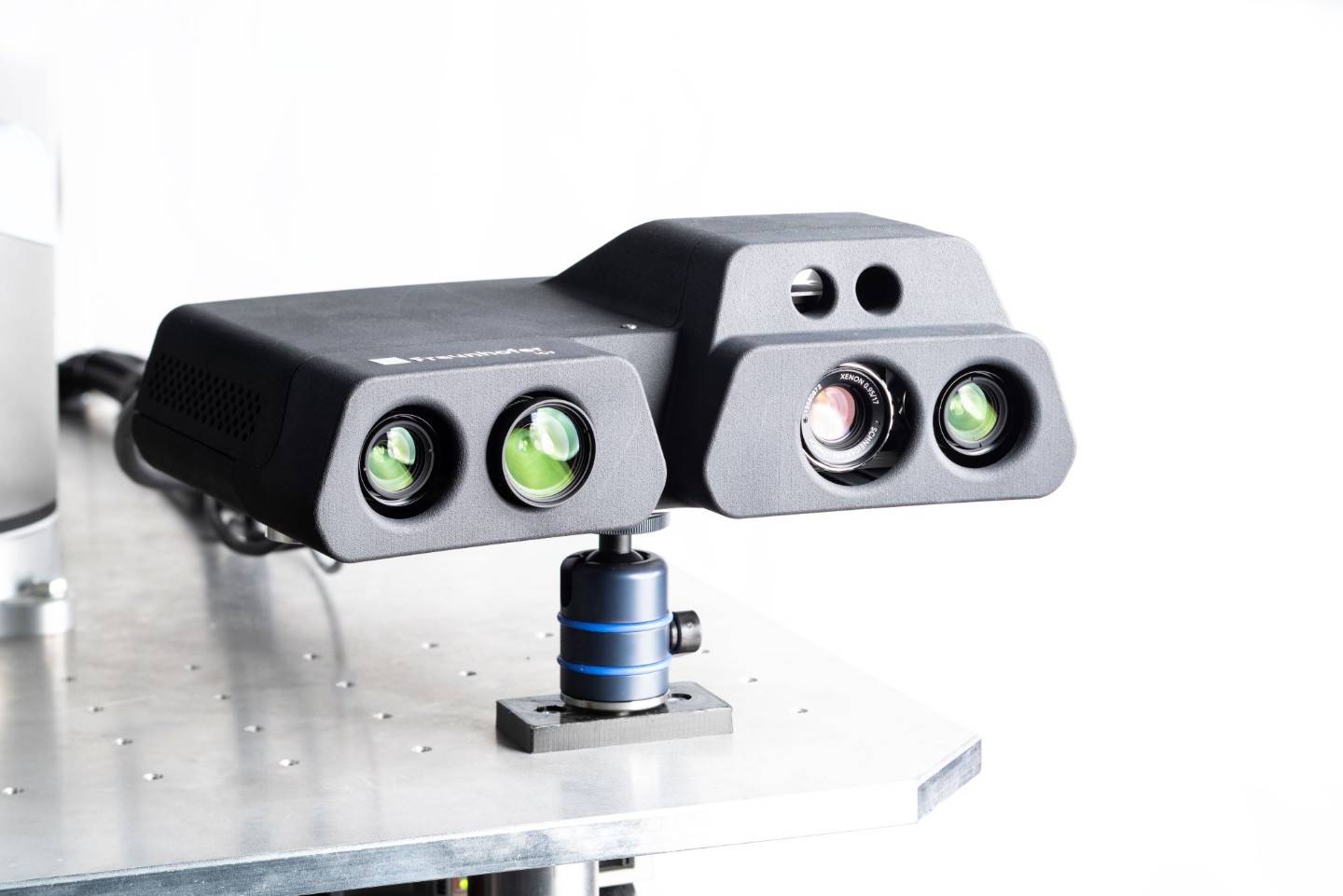
Für die Mensch-Maschine-Interaktion ist die Echtzeitfähigkeit unserer High-Speed 3D-Sensorik ein Schlüsselelement. Durch das Hinzufügen weiterer bildgebender Modalitäten kann das Auffinden und Greifen von bisher unkooperativen Gegenständen, d.h. transparent, spiegelnd oder tiefschwarz, ermöglicht werden.